
As future aircraft move toward urban air mobility (UAM), landing will increasingly occur on uneven and unpredictable terrain rather than flat runways. Most existing landing gear systems are not designed for this condition, creating risks during touchdown.
My team has designed an adaptive landing mechanism inspired by bird feet. The system can passively conform to irregular ground surfaces while actively stabilizing and gripping the surface during landing.
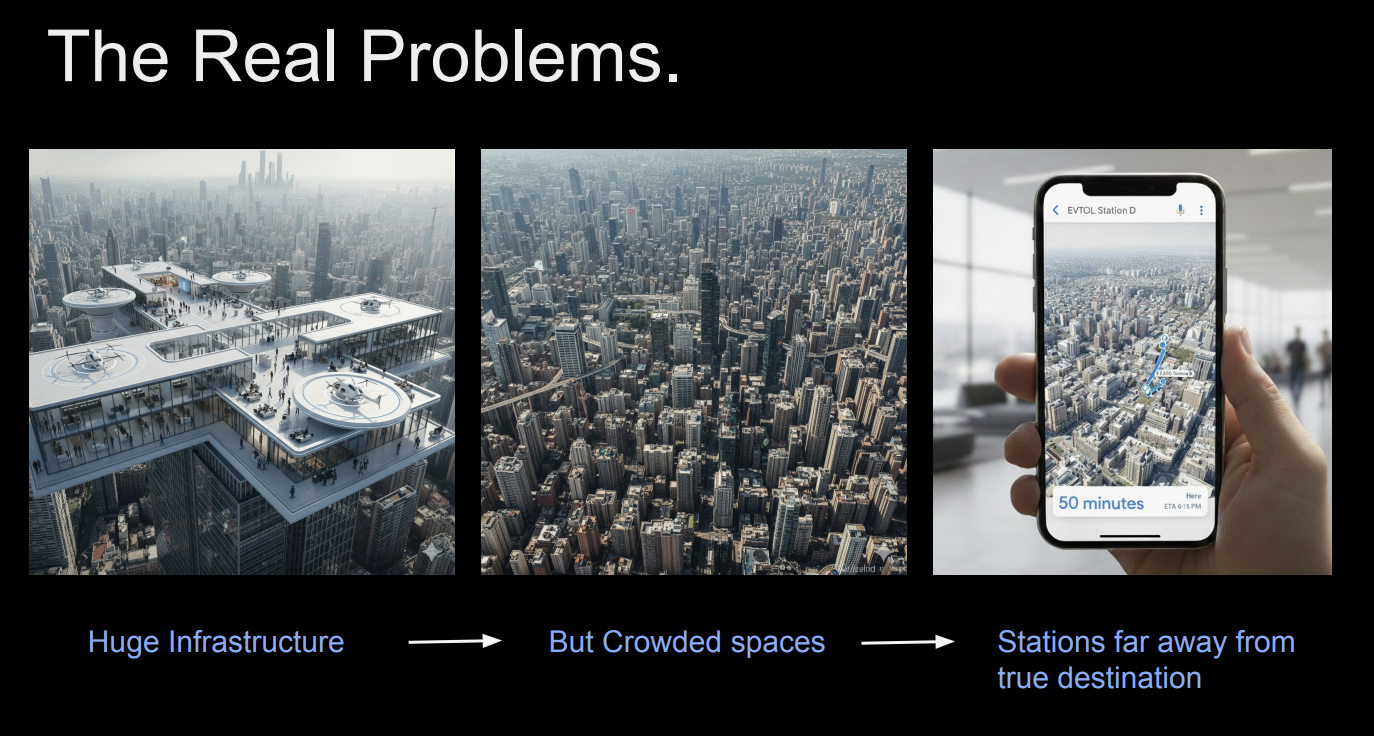
Lack of Infrastructure: Vertiports require flat, reinforced sites that are scarce, expensive to build, and difficult to integrate into dense cities.
Last-Mile Issue: Limited landing locations place users far from their final destination, reducing convenience and preventing UAM from functioning as true public mobility.
Research Gap: Few existing studies on adaptive landing gear for uneven terrain.
Design Trade-off: Balancing structural strength with minimal added weight.
Scale Challenge: Translating bird-scale mechanics to aircraft-scale loads.
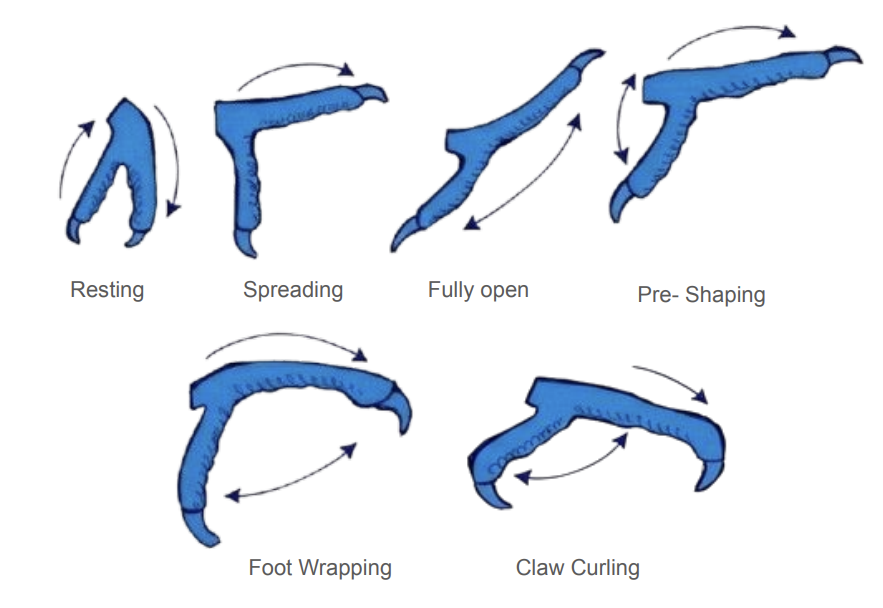
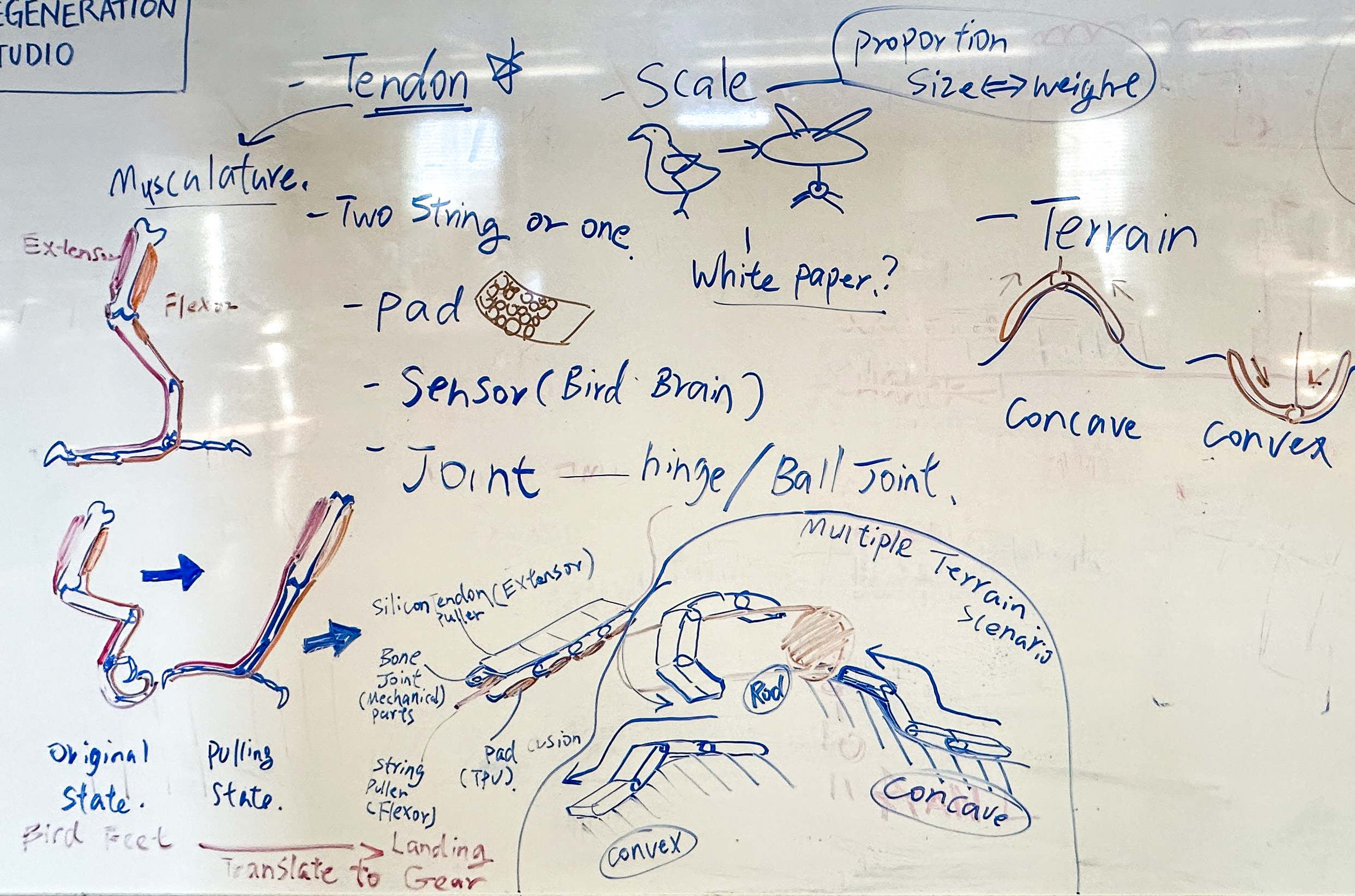
Nature has already provide answers on how to efficiently fly and land on anywhere while carrying precious load. Predatory birds are our reference in this case. The question is to adapt its mechanism to limitation of material and manufacturability.
Their feet combine multi-joint articulation, compliant soft tissue, and tendon-based locking mechanisms to adapt to terrain and generate strong gripping forces, enabling both stable perching and effective prey capture.





1. Machanical testing & iteration: tested range of motion, compliance, and friction, using a simple pulling mechanism to achieve coordinated multi-joint movement.
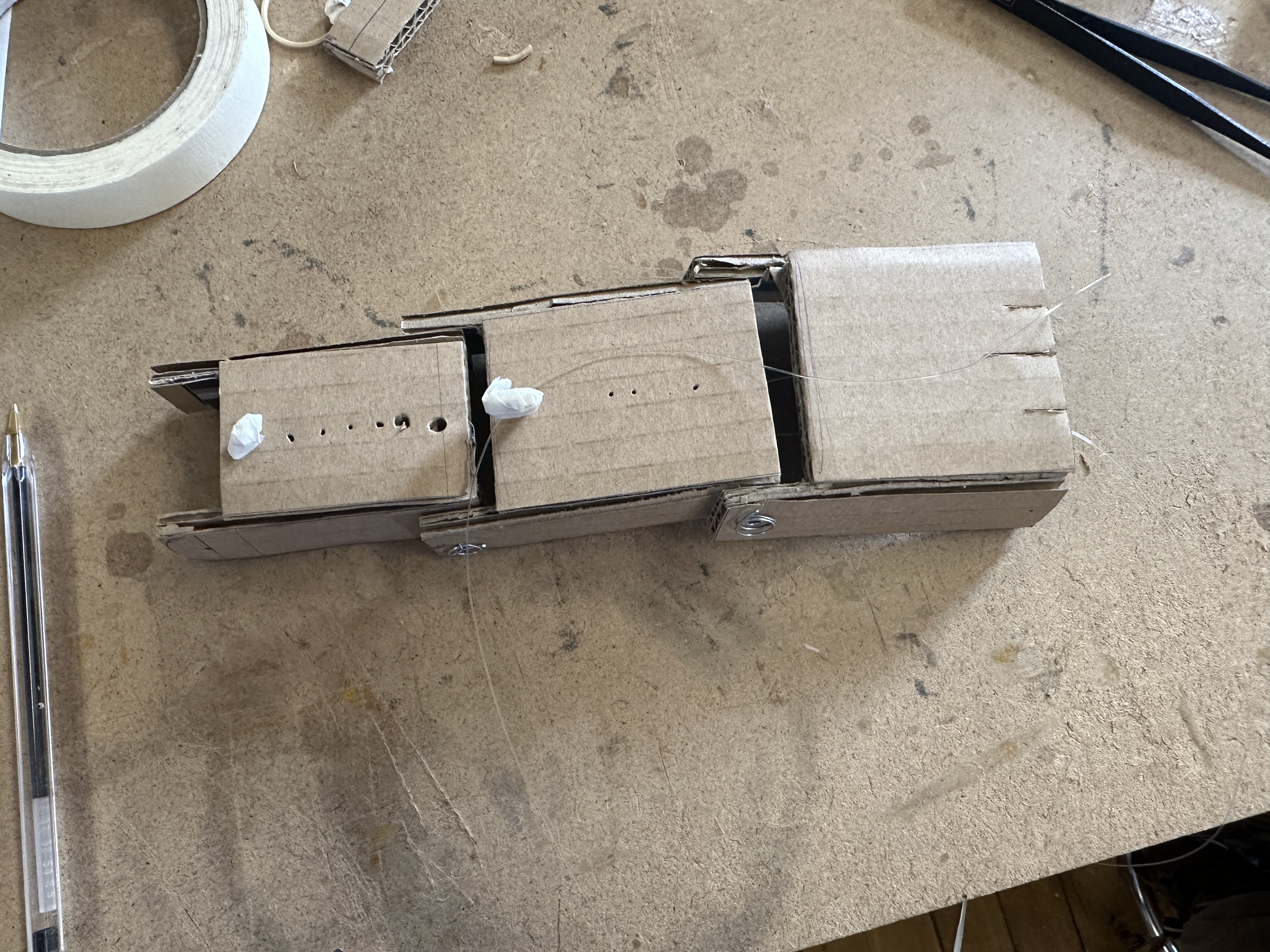

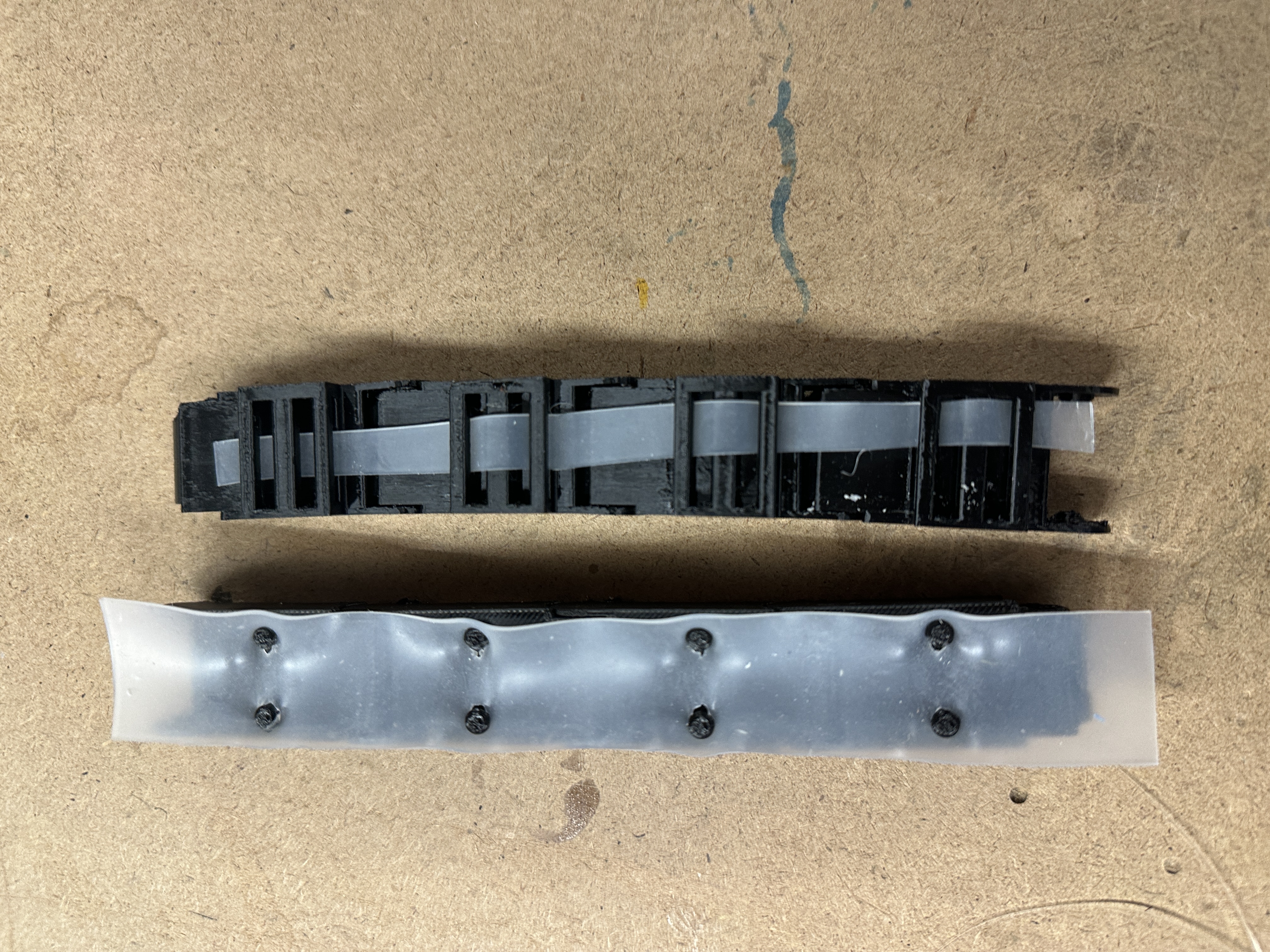
2. Proof of Concept: Rapid prototyping using cardboard, 3D-printed TPU, PLA, resin, and silicone elastic bands to validate the mechanism.
3. Expert Feedback: we reached out to profesionals in biology, mechanical engineering, and mobility design to ensure accurate biological translation and mechanical feasibility.
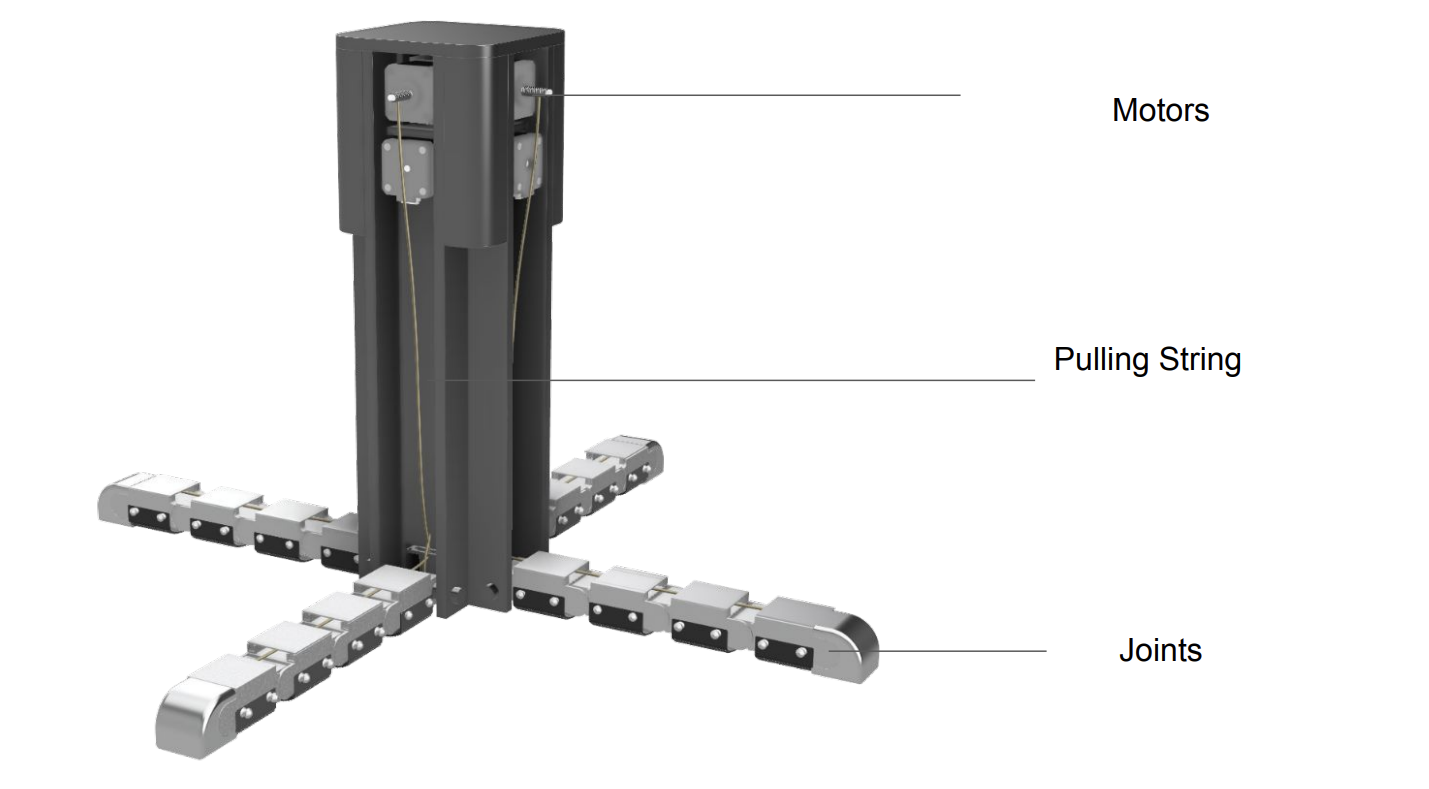
In real application, the mechanism consists of a compact central housing and four articulated fingers with a total of sixteen joints, allowing the structure to conform to uneven terrain during landing. Multi-degree-of-freedom motion is achieved through a single linear actuation using a tendon-like fishing wire. Upon ground contact, the joints passively adapt to surface geometry; when the wire is tensioned, the fingers contract simultaneously, generating inward and downward forces that grip the ground and stabilize the aircraft.

Gripping

Contracting