The NASA Human Exploration Rover Challenge (HERC) challenges student teams to build a human-powered rover capable of safely navigating rough and unpredictable terrain. As part of the RISD Rover team, I designed and tested the rover’s steering system, addressing strict constraints on weight, performance, space packaging, and durability while delivering intuitive, rider-friendly control.

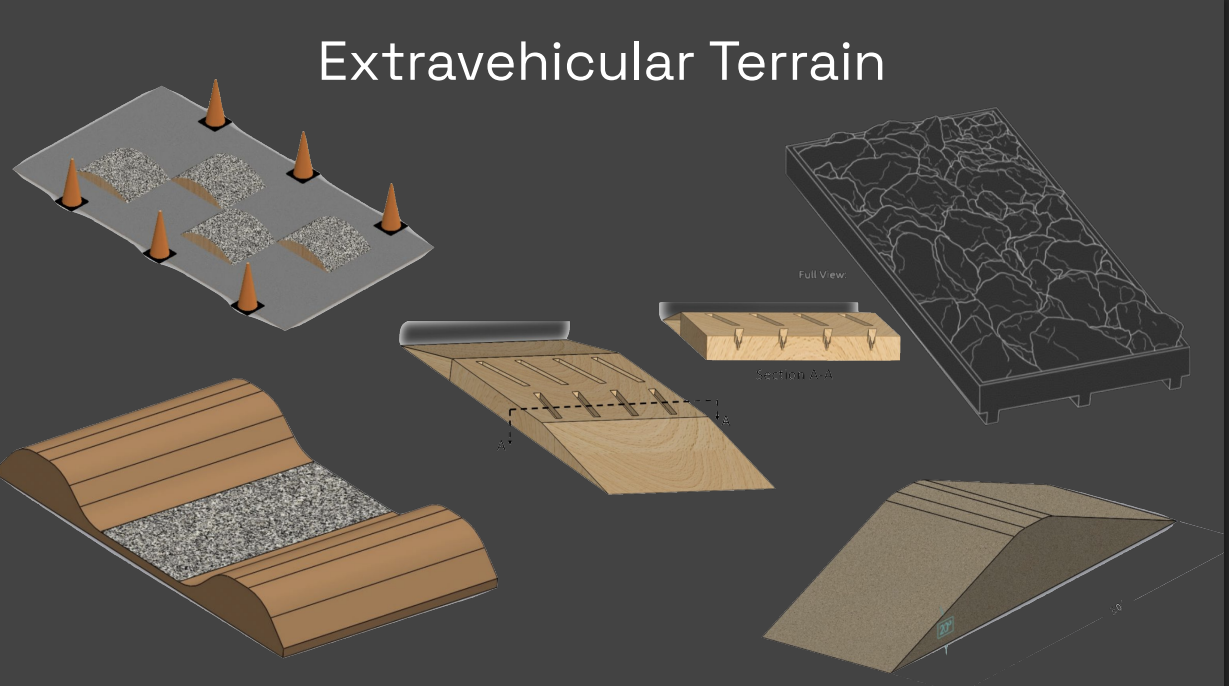
Teams are evaluated on successful mission task completion, efficiency within the time limit (including penalties), and safe, reliable control across terrain without failures or rule violations.
As most teams come from engineering schools, RISD Rover, as a design-based team, focused on creating a more integrated and lightweight rover, maintaining a three-wheel configuration (a trike like the right imag) for its simplicity, performance, and weight efficiency.
However, some subsystems , like the steering, demanded deep theoretical and mechanical understanding, which involves complex geometric calculation. I took on this challenge, guiding the process from studying steering mechanisms and exploring alternative concepts.

The best way to understand how the length, connections, and geometry of steering components influence variables such as bump steer, steering angle, and stability is to physically test and evaluate them.

Study cardboard modles to understand steering geometry.
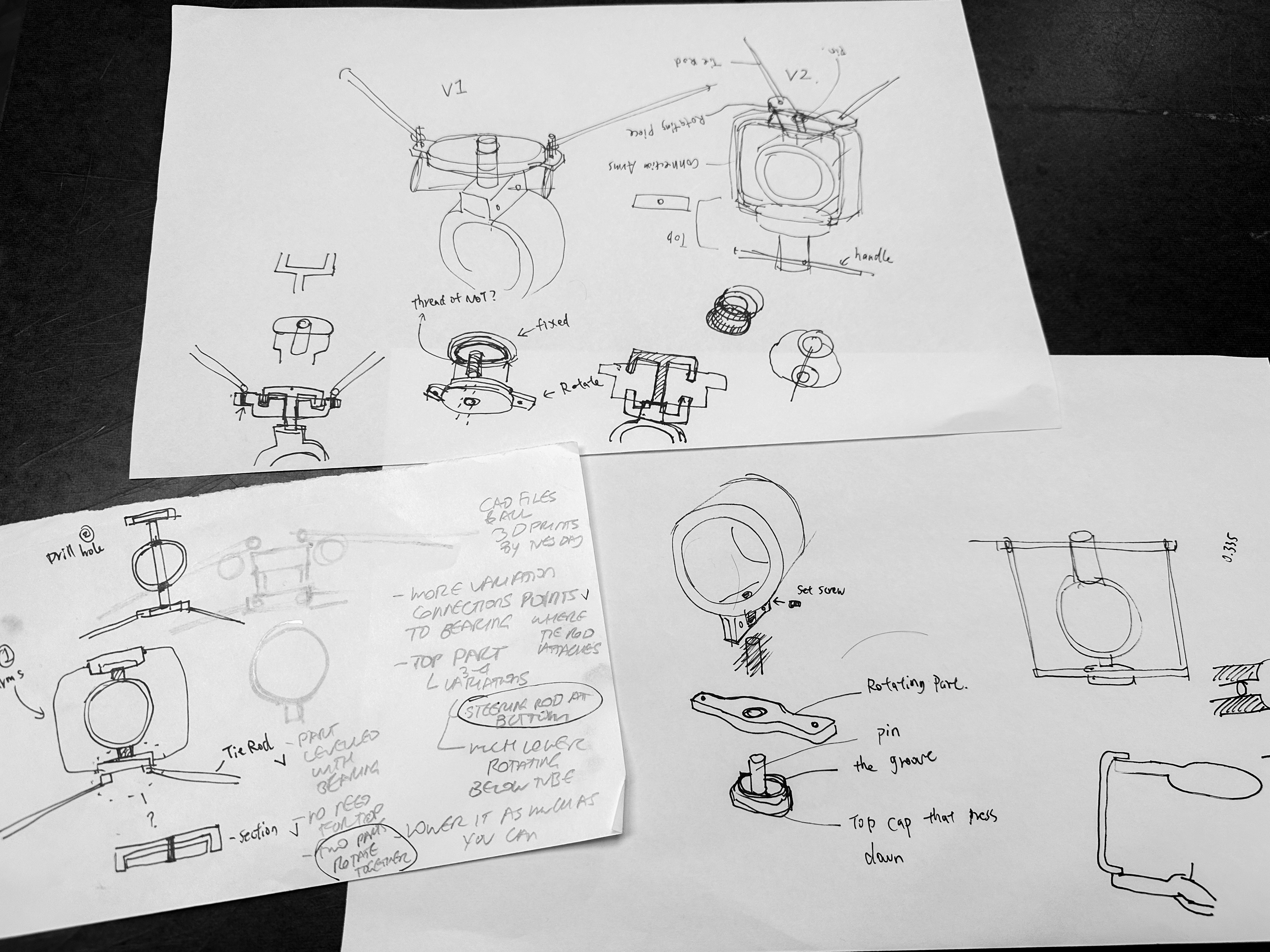
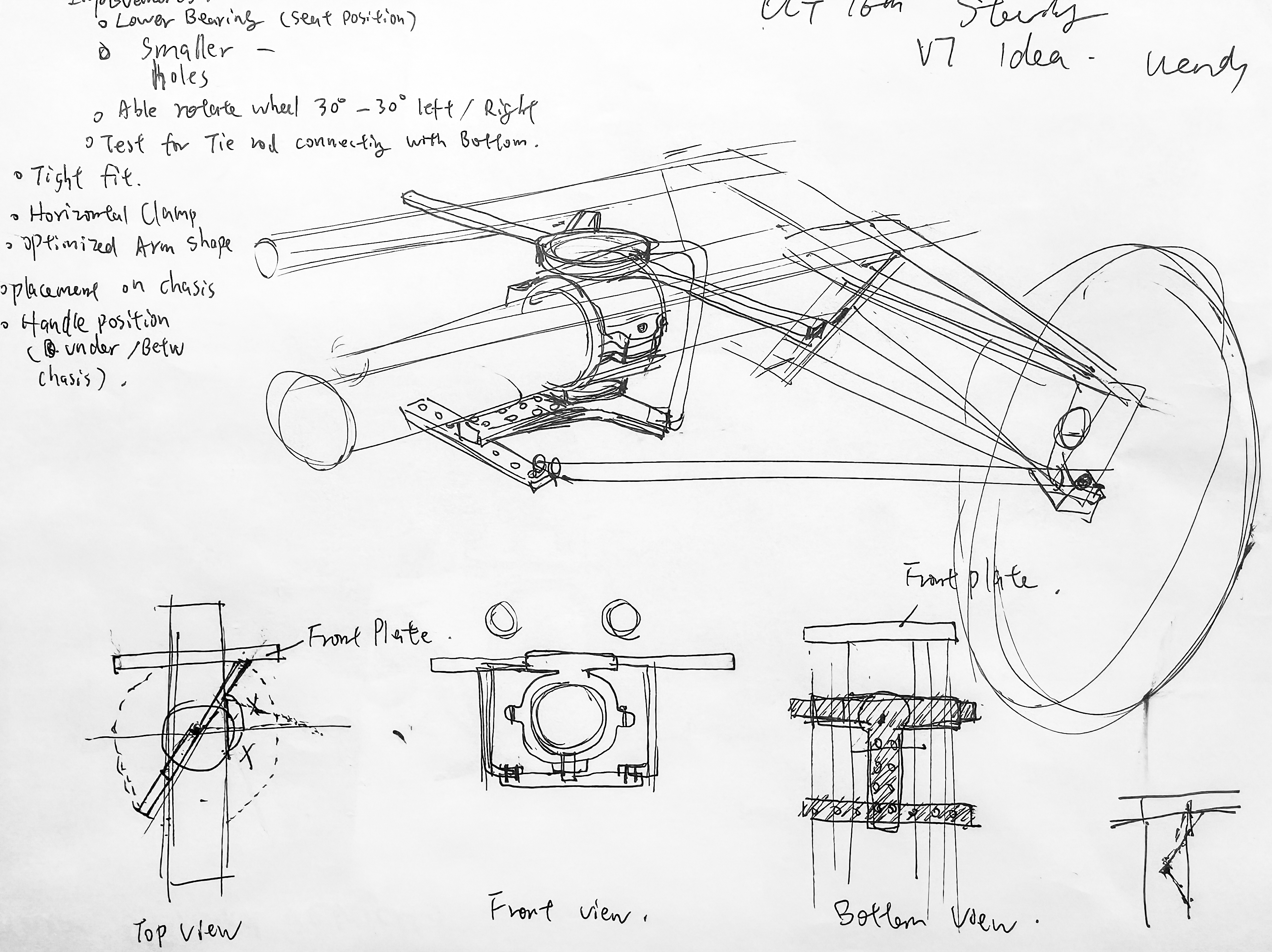
A dual-pivot four-bar linkage that allows more optimal tie-rod geometry, achieving larger steering angles and reduced bump steer while maintaining intuitive side-to-side control.
A centrally pivoted handlebar system that mirrors bicycle ergonomics but is constrained by chassis geometry, resulting in limited steering angle and increased bump steer under uneven terrain.


We evaluated the two steering systems based on the following aspects:
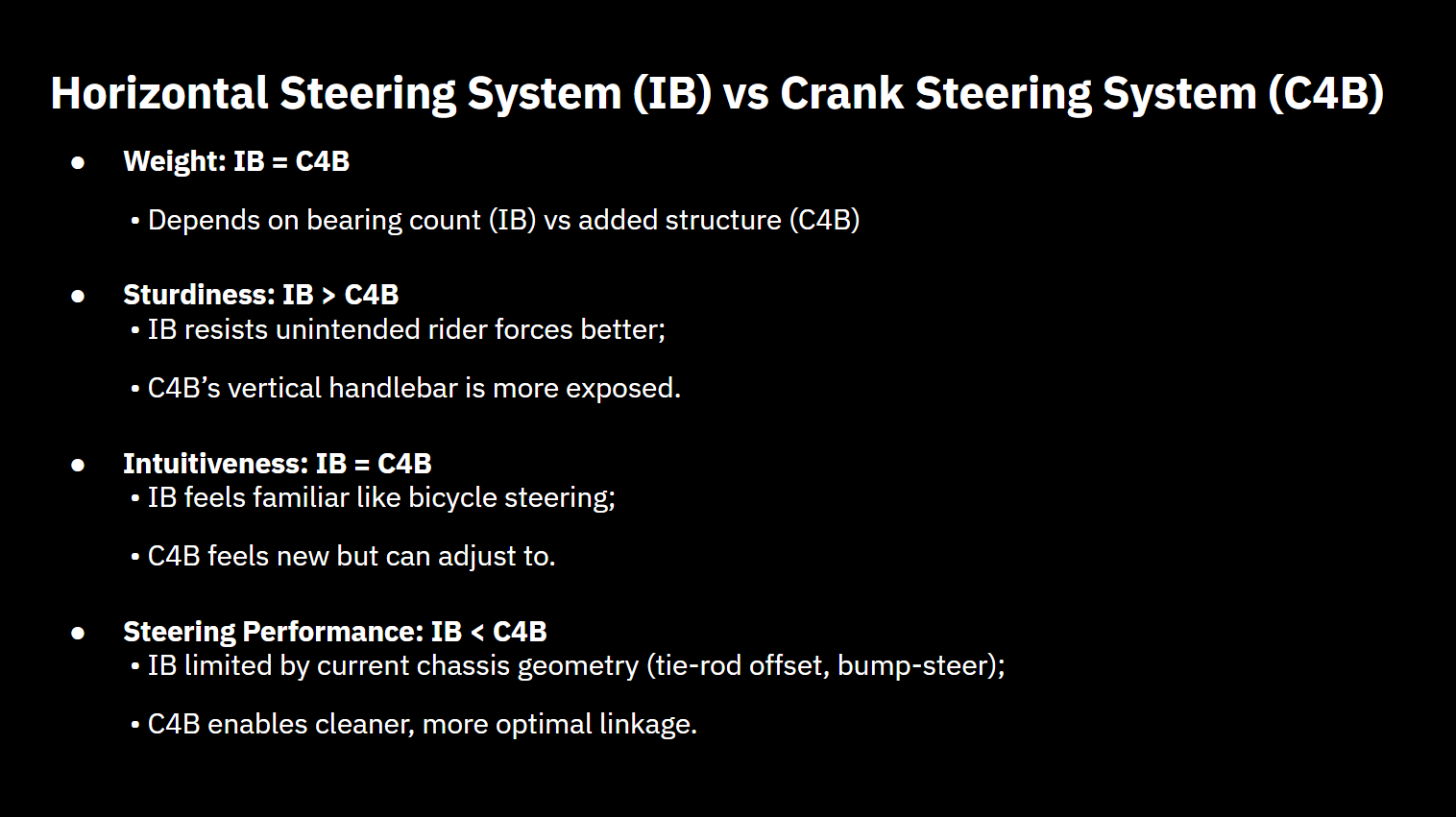
As well as ergonomic factors:
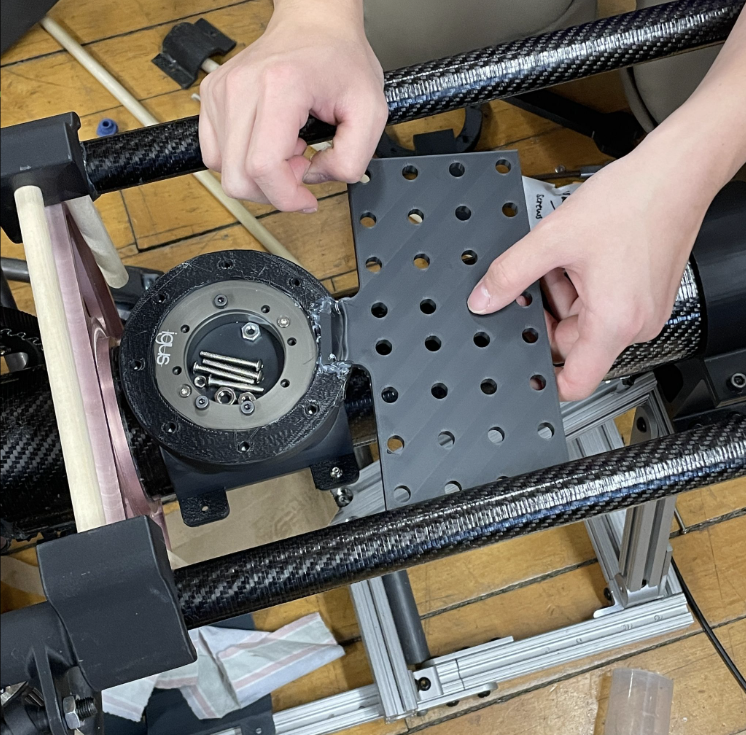
We move on to the crank steering system because it is easier to fabricate and don't invovle space packaging issue that the horizontal steering does.

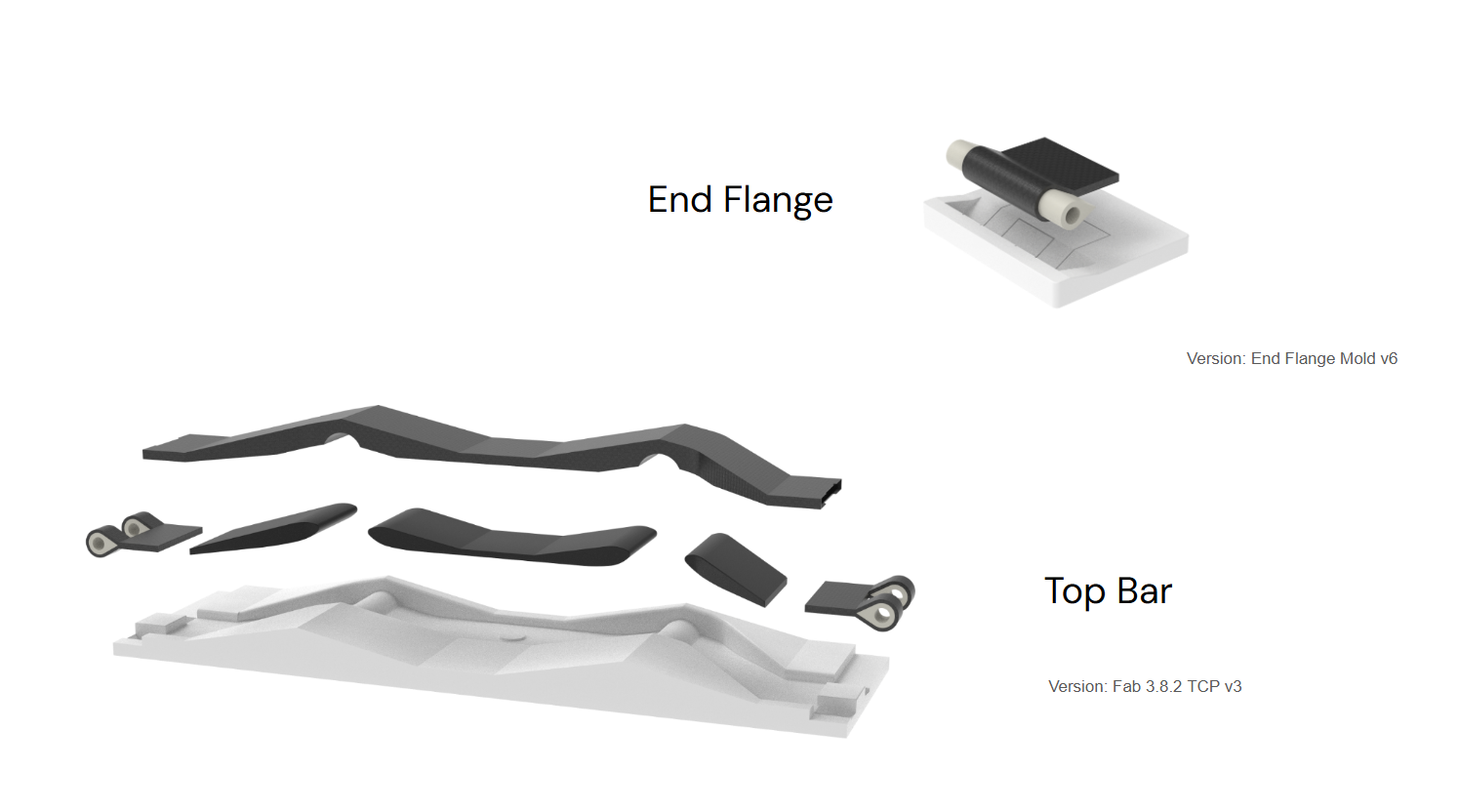
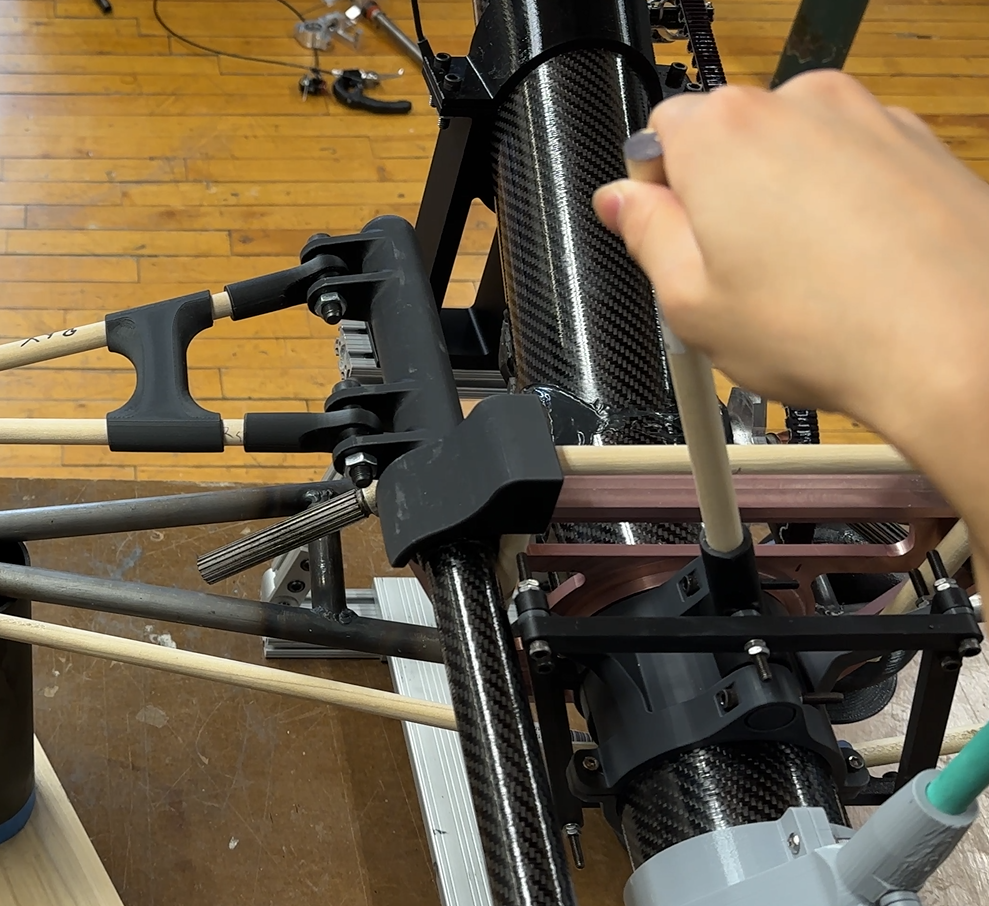
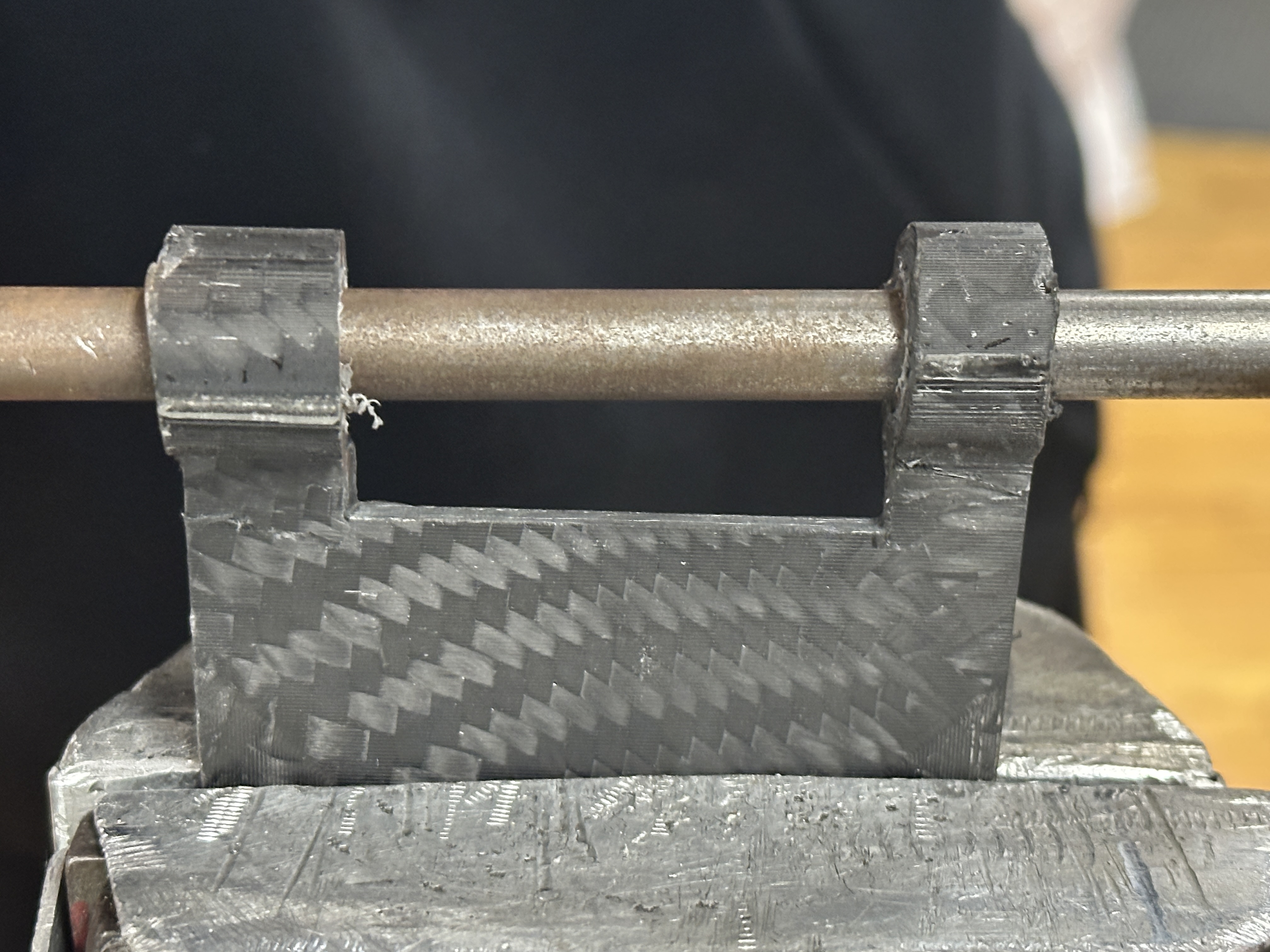
Based on the strenth test performed on joints and connecting points, the shape of crank arm went through iterations.
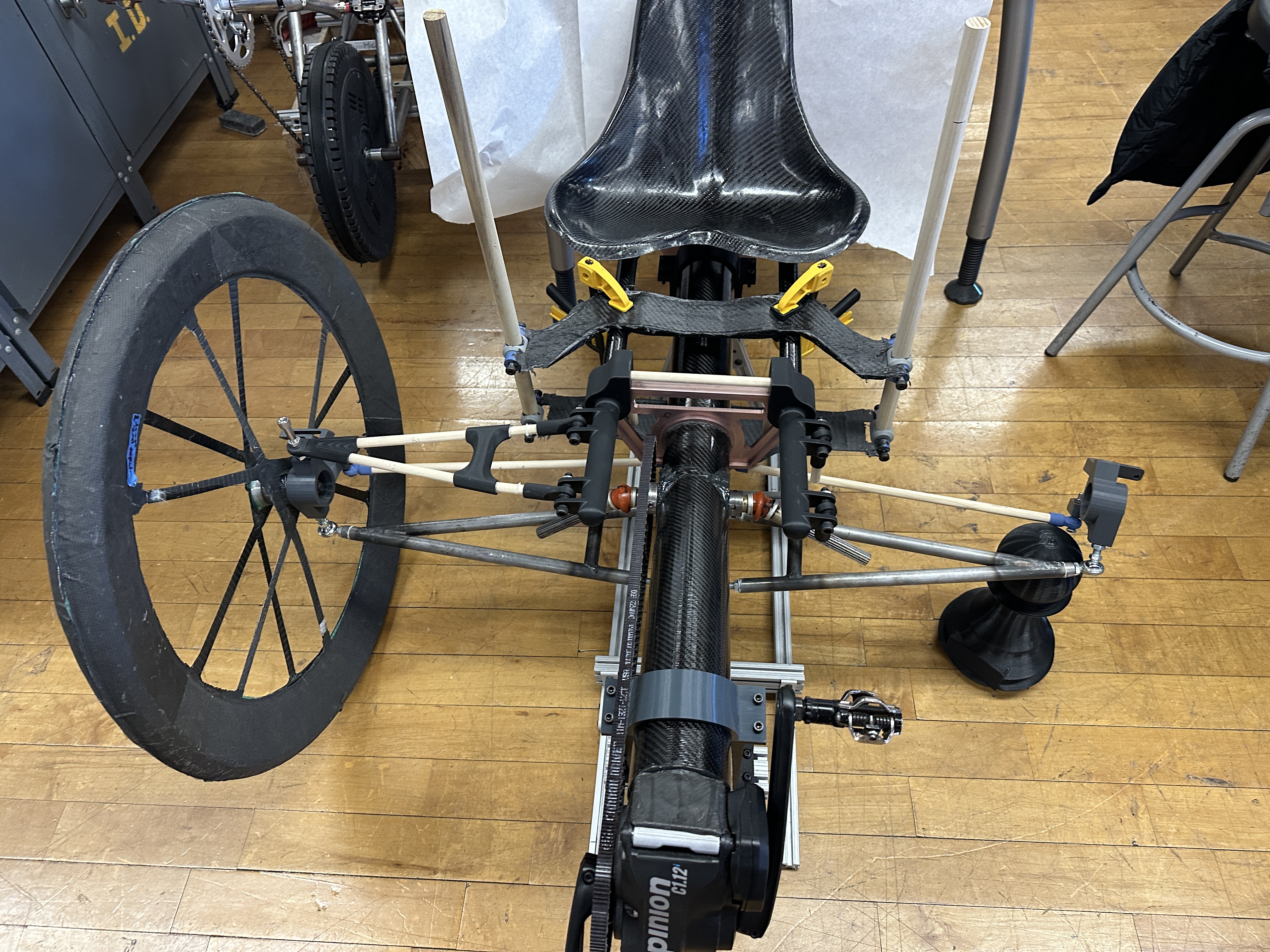
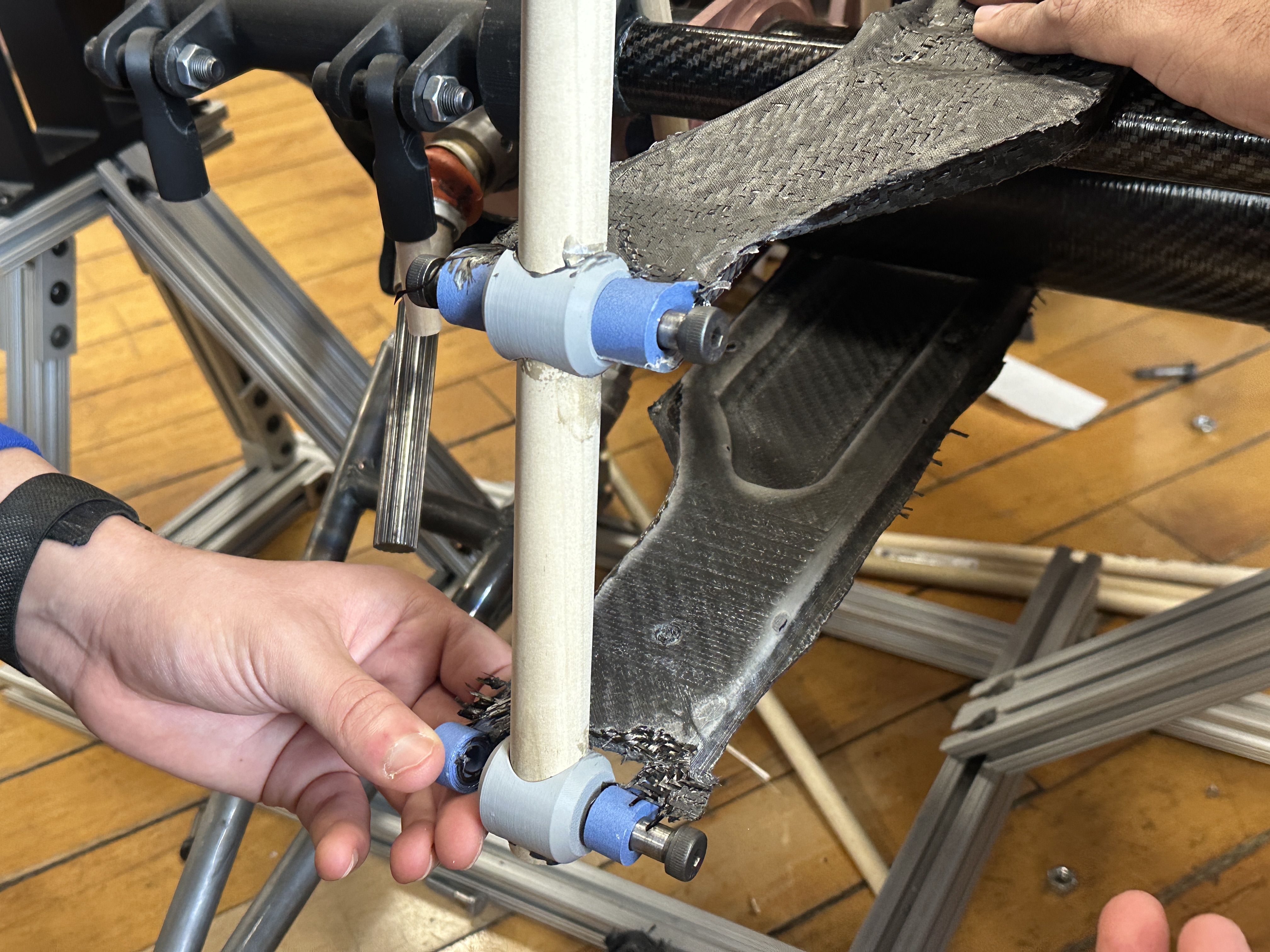
We temporarily mounted the system onto the chassis, where it operated smoothly, and are now ready to move into the next stage. Once the full rover is assembled, we will conduct real-world testing.